|
|
Vol. 8, e1417, año 2026 ISSN – Online: 2708-3039 DOI:
https://doi.org/10.47796/ing.v8i00.1417 |

![]()
Artículo
original
Diseño e implementación de un generador de funciones
usando IoT
Design and Implementation
of a Function Generator Using I
Jhoan David Barón Achury1 ![]() | Oscar Mauricio Nevado2
| Oscar Mauricio Nevado2 ![]() | Cesar Augusto Romero Molano3*
| Cesar Augusto Romero Molano3* ![]()
|
Afiliación: 1,2,3 Ingeniería Electrónica, Facultad de Ciencias
Básicas e Ingenierías, Universidad de los Llanos, Villavicencio, Colombia Autor de correspondencia: E-mail: *cesar.romero@unillanos.edu |
Información del artículo: Recibido: 26/01/2026 Aceptado: 21/04/2026 Publicado: 05/05/2026 |
![]()
Resumen
La enseñanza
de la electrónica requiere herramientas didácticas que integren tecnologías
emergentes y favorezcan la experimentación práctica en entornos educativos. En
este contexto, el estudio tuvo como objetivo diseñar e implementar un generador
de funciones controlado mediante tecnologías de Internet de las Cosas (IoT),
incorporando principios de computación ubicua para el desarrollo de un sistema
accesible, flexible y automatizado. Para ello, se desarrolló una arquitectura
distribuida compuesta por una aplicación web desplegada en la nube, una base de
datos con comunicación en tiempo real mediante WebSocket, un módulo IoT basado
en ESP8266 y un módulo generador implementado en un microcontrolador RP2040,
empleando un DAC R-2R para la generación de señales. Los resultados evidencian
que el sistema permite la generación de señales sinusoidales, cuadradas y
diente de sierra en un rango de 10 Hz a 100 kHz, con errores de frecuencia
inferiores al 0,12 % y una latencia promedio de control de 320 ms. Asimismo, el
prototipo facilita la interacción remota y el monitoreo en tiempo real de los
dispositivos. Se concluye que la integración de IoT en el generador de
funciones fortalece el aprendizaje en electrónica al mejorar la accesibilidad,
el control y las competencias prácticas.
Palabras
clave: educación;
generador de señales; internet de las cosas.
Abstract
Electronics education requires didactic tools that
integrate emerging technologies and promote hands-on experimentation in
educational environments. In this context, the aim of this study was to design
and implement a function generator controlled through Internet
of Things (IoT) technologies, incorporating principles of ubiquitous
computing to develop an accessible, flexible, and automated system. To this
end, a distributed architecture was developed, consisting of a cloud-deployed
web application, a database with real-time communication via WebSocket, an IoT
module based on ESP8266, and a signal generator module implemented on an RP2040
microcontroller using an R-2R DAC for signal generation. The results show that
the system enables the generation of sine, square, and sawtooth waveforms
within a frequency range of 10 Hz to 100 kHz, with frequency errors below 0.12 %
and an average control latency of 320 ms. Additionally, the prototype supports
remote interaction and real-time monitoring of the devices. It is concluded
that the integration of IoT into the function generator enhances electronics
learning by improving accessibility, system control, and practical skills.
Keywords: education;
signal generator; internet of things.
1. Introducción
En la era digital actual, la interconexión de
dispositivos y la integración del Internet de las Cosas (IoT, Internet of
Things) han revolucionado la manera en la cual los usuarios se involucran
con la tecnología y la forma en que los dispositivos se comunican entre sí
(Barrio Andrés, 2022). Este avance ha dado lugar a un amplio campo de
aplicaciones innovadoras y, en particular, ha transformado el diseño y uso de
los generadores de funciones en la ingeniería electrónica y disciplinas afines.
Los generadores de funciones digitales constituyen herramientas esenciales en
las prácticas de laboratorio y en el ámbito de la investigación, ya que
facilitan el entendimiento de diversas teorías asociadas al análisis de señales
eléctricas. En este sentido, han evolucionado significativamente para
aprovechar las ventajas de la conectividad IoT, incorporando capacidades de
control remoto, monitoreo y automatización (Li, 2020).
Desde una perspectiva histórica, el generador de
funciones como dispositivo electrónico de laboratorio fue implementado en 1928
por la empresa General Radio (Massachusetts, Estados Unidos), siendo
comercializado con rangos de frecuencia desde 500 Hz hasta 1,5 MHz y
caracterizándose por su bajo costo para aplicaciones de investigación y estudio
de la modulación de señales, lo que permitió su adopción como uno de los
primeros generadores analógicos (Burke, 1930).
A partir de este desarrollo inicial, se diseñaron
distintos tipos de generadores orientados principalmente a la prueba de equipos
de radio y televisión. No obstante, estos dispositivos presentaban limitaciones
importantes, como una baja capacidad para generar señales de alta frecuencia,
elevada susceptibilidad a interferencias electromagnéticas y una limitada
estabilidad operativa (Wheeler, 1930; Ott, 2009). Además, sus primeras
versiones estaban compuestas exclusivamente por elementos analógicos, tales
como amplificadores, osciladores y filtros, lo que implicaba una menor
precisión en las señales generadas y dificultades en su visualización e
interpretación.
El proceso evolutivo de estos dispositivos condujo
a la incorporación progresiva de tecnologías digitales, dando lugar a los
generadores de funciones digitales. Estos sistemas, mediante la conversión
digital-analógica (DAC, Digital to Analog Converter) de datos binarios
almacenados en memoria, permiten muestrear y reproducir señales con mayor
exactitud (National Instruments, 2025). Asimismo, presentan una mayor
estabilidad en comparación con los generadores analógicos tradicionales, ya que
reducen la influencia de fluctuaciones en la fuente de alimentación y de factores
ambientales.
En este contexto, se han desarrollado diversas
propuestas basadas en tecnologías digitales avanzadas. Xu et al. (2011)
diseñaron un generador de señales basado en FPGA FLEX 10K, capaz de generar
señales periódicas mediante la combinación de hasta seis señales senoidales con
control sobre amplitud, frecuencia y fase. Este enfoque permite obtener una
señal periódica cuya frecuencia fundamental corresponde al mínimo común
múltiplo de las señales combinadas, constituyéndose en una herramienta útil
para el análisis de filtros y armónicos en señales sinusoidales distorsionadas.
De manera complementaria, Prasad y Sanyal (2007) propusieron un generador
basado en síntesis digital directa, estructurado en etapas de adquisición de
datos, cálculo de parámetros y almacenamiento en memoria para su posterior
conversión a señal analógica.
La exploración de señales y su descomposición en
componentes armónicas, así como la mejora de señales distorsionadas,
constituyen temas recurrentes en el ámbito educativo, particularmente en la
formación en electrónica (Oppenheim y Schafer, 2016). En este sentido, los
generadores de funciones digitales se convierten en herramientas didácticas
fundamentales, al permitir la implementación de filtros y el análisis de la
componente fundamental de señales deformadas.
Adicionalmente, se han reportado desarrollos
orientados al control remoto de generadores de funciones. Molina-Ríos et al.
(2018) implementaron una aplicación basada en MATLAB para el envío de señales a
través de una red de área local (LAN) hacia un generador comercial AFG3102,
incorporando una interfaz gráfica que facilitaba la selección de parámetros
como frecuencia, amplitud y fase. Por otra parte, Batavale y Daruwala (2019)
propusieron un generador de funciones de bajo costo basado en Arduino, diseñado
para superar limitaciones económicas en entornos educativos. Sin embargo, este
sistema presentó restricciones en su frecuencia máxima de operación, limitada a
10 kHz debido a las características del DAC empleado (Raspberry Pi Ltd., 2024).
Además, otros estudios han explorado la integración
de generadores de funciones digitales con tecnologías como IoT, FPGA y
microcontroladores en contextos educativos y de investigación (Vince, 2020; Li
et al., 2019; Tan et al., 2018). Estos antecedentes evidencian un avance
significativo en el desarrollo de estos dispositivos, aunque aún persisten
limitaciones relacionadas con la accesibilidad, el control remoto en tiempo
real y la integración con plataformas en la nube. En este contexto, el presente
estudio tiene como objetivo diseñar e implementar un generador de funciones
basado en IoT que permita el control remoto, el monitoreo en tiempo real y la
automatización del proceso de generación de señales, contribuyendo al
fortalecimiento del aprendizaje práctico en electrónica en entornos educativos
y de laboratorio.
2. Metodología
2.1. Aplicación web
La aplicación web fue diseñada considerando
los requerimientos funcionales del sistema y los criterios de interacción entre
el usuario y el dispositivo. La interfaz de usuario se implementó utilizando
Angular, desplegada de manera independiente en un entorno de desarrollo en la
nube mediante la plataforma Vercel, la cual gestiona tanto la infraestructura
del servidor como las redes de entrega de contenido.
Para la gestión de datos se empleó Supabase,
una plataforma que proporciona servicios de base de datos relacional,
autenticación de usuarios y comunicación en tiempo real. Esta integración
permitió administrar el registro y control de usuarios, así como facilitar la
comunicación simultánea con múltiples dispositivos para el envío y recepción de
información. En la Tabla 1 se presentan los servicios ofrecidos por ambas
plataformas, evidenciando su complementariedad dentro de la arquitectura del
sistema.
|
Tabla 1 Servicios ofrecidos por Vercel y Supabase |
||
|
Características |
Vercel |
Supabase |
|
Hosting de
aplicaciones web |
Sí |
— |
|
Despliegue continuo |
Sí |
— |
|
Funciones serverless |
Sí |
— |
|
Análisis de
rendimiento |
Sí |
— |
|
Base de datos relacional |
— |
Sí |
|
API RESTful |
— |
Sí |
|
Websockets en tiempo
real |
— |
Sí |
|
Autenticación y
autorización |
— |
Sí |
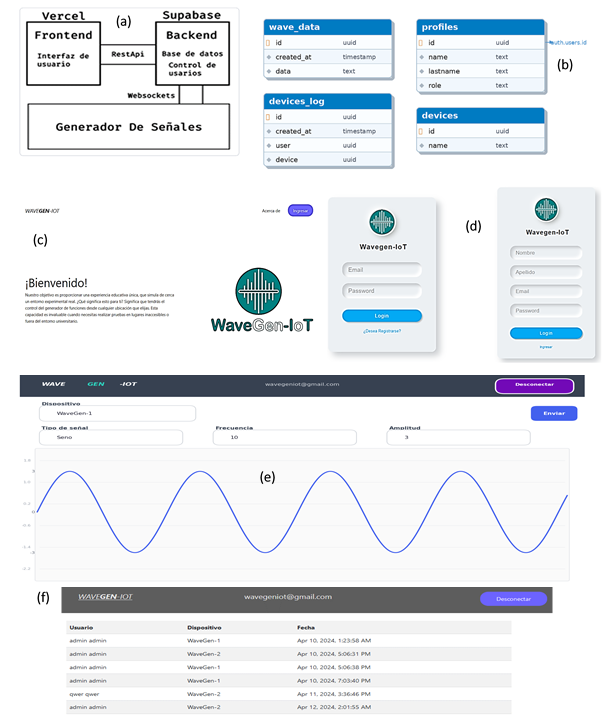
La arquitectura general del sistema se muestra
en la Figura 1a, donde la comunicación entre Vercel y Supabase se realiza
mediante la interfaz REST API proporcionada por esta última, permitiendo la
interacción con las tablas de la base de datos. Por otro lado, la comunicación
entre la base de datos y el generador de señales se implementó mediante
WebSockets, con el objetivo de garantizar la transmisión de datos en tiempo
real y minimizar la latencia entre el envío de comandos desde la interfaz y su
ejecución en el dispositivo. Por su parte, la estructura de la base de datos se
presenta en la Figura 1b, donde se identifican las cuatro tablas principales
del sistema.
|
Figura 1 Interfaz y arquitectura del sistema
WaveGen-IoT |
|
|
A
La tabla profiles almacena la
información de los usuarios registrados junto con sus roles, los cuales
determinan los niveles de acceso: admin, con acceso al historial de uso;
user, con acceso al control del dispositivo; y device, asignado a
cada módulo generador con acceso a la tabla wave_data. La tabla devices
registra los módulos integrados al sistema, mientras que devices_log
almacena el historial de uso. Finalmente, la tabla wave_data contiene la
configuración de las señales a generar y cuenta con la funcionalidad realtime,
que permite establecer canales WebSocket para la transmisión de datos
hacia los dispositivos.
En cuanto a la interfaz, esta fue desarrollada
en Angular 17. En la Figura 1c se muestra la página de inicio, desde donde se
accede a los módulos de autenticación. En la Figura 1d se presentan los
formularios de inicio de sesión y registro. La Figura 1e corresponde a la
interfaz de control del dispositivo, donde el usuario puede seleccionar el
módulo generador y configurar los parámetros de la señal, tales como tipo de
onda, frecuencia y amplitud. Finalmente, en la Figura 1f se muestra la vista de
registro de uso, donde se almacenan las interacciones realizadas en el sistema.
2.2. Módulo
IoT
Dado que el sistema
requiere el control remoto del generador de señales a través de internet, se
implementó un mecanismo de comunicación en tiempo real mediante WebSockets, lo
que permitió la sincronización inmediata entre la base de datos y múltiples
dispositivos.
|
Figura 2 Diagrama de flujo del módulo IoT |
|
|
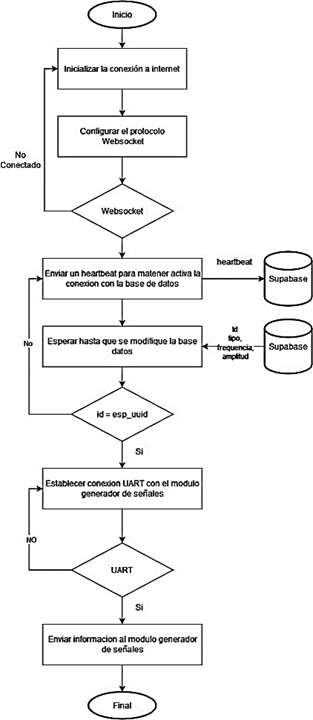
Este enfoque es
consistente con arquitecturas modernas de comunicación en sistemas
distribuidos, donde la baja latencia es un requisito clave para el control
remoto. Para esto, se utilizó el microcontrolador ESP8266, el cual cuenta con
conectividad WiFi integrada. La Figura 2 describe el funcionamiento del módulo
IoT. Inicialmente, el dispositivo intenta conectarse a una red WiFi y, una vez
establecida la conexión, configura un canal WebSocket con la base de datos.
Posteriormente, se envían señales de tipo heartbeat para mantener activa la
conexión. Cuando se produce una modificación en la base de datos, esta
transmite la información a todos los módulos conectados. Cada módulo IoT cuenta
con un identificador único que permite diferenciarlo dentro del sistema. Cuando
el identificador del mensaje recibido coincide con el del dispositivo, se
establece la comunicación con el módulo generador de señales mediante el
protocolo UART. A través de este canal serial se envían los parámetros
definidos por el usuario en la aplicación web, incluyendo el tipo de señal, la
frecuencia y la amplitud.
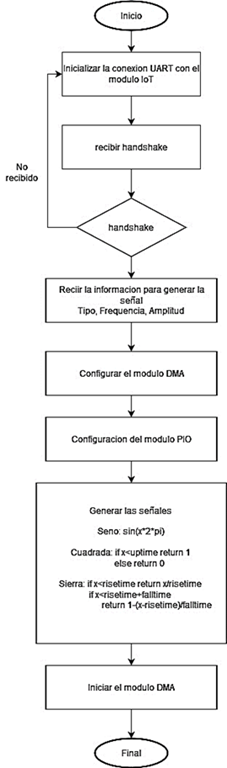
2.3. Módulo
generador de señales
El módulo generador de señales fue
implementado utilizando una tarjeta de desarrollo Raspberry Pi Pico, basada en
el microcontrolador RP2040. Su funcionamiento se ilustra en la Figura 3. En
primer lugar, se configura la comunicación con el módulo IoT mediante el
protocolo UART. Una vez establecida la conexión serial, se reciben los datos
necesarios para la generación de la señal, correspondientes al tipo de onda, la
frecuencia y la amplitud. El núcleo del procesamiento
se basa en el uso del módulo DMA (Direct Memory Access), el cual permite
transferir bloques de memoria entre periféricos sin intervención de la CPU,
optimizando el rendimiento del sistema. Este enfoque es ampliamente utilizado
en sistemas de procesamiento de señales digitales debido a su eficiencia en la
manipulación de grandes volúmenes de datos (Oppenheim & Schafer, 2016). El
DMA se configura para transferir el contenido de un arreglo que contiene la
señal generada hacia el módulo PIO (Programmable Input/Output), encargado de
modificar el estado de los pines de salida del microcontrolador.
|
Figura 3 Diagrama de flujo del generador de señales |
|
|
Debido a que el DMA debe operar de manera continua y sin interrupciones,
se implementa una configuración de doble canal utilizando la técnica de chaining,
donde un canal reconfigura automáticamente al otro una vez finalizada la
transferencia. El microcontrolador RP2040 dispone de dos módulos PIO, cada uno
con cuatro máquinas de estado, las cuales permiten implementar lógica
programable para el control preciso de señales digitales (National Instruments,
2025). En este diseño se utilizó una de estas máquinas de estado para
transferir, en cada ciclo de reloj, los 8 bits almacenados en su buffer hacia
los pines de salida del microcontrolador, proceso que se repite de manera
continua para garantizar la reconstrucción estable de la señal digital.
Para la generación de las señales, se construye un arreglo (buffer)
que almacena los valores necesarios para recrear la forma de onda, calculados a
partir de los parámetros recibidos desde el módulo IoT. Este procedimiento es consistente
con técnicas clásicas de síntesis digital de señales, donde las formas de onda
se discretizan y almacenan para su posterior reproducción (Oppenheim &
Schafer, 2016). El sistema fue diseñado para generar señales sinusoidales,
cuadradas y diente de sierra. La amplitud máxima se estableció en 3,3 V,
correspondiente al nivel lógico del microcontrolador, mientras que el rango de
frecuencia se definió entre 10 Hz y 100 kHz, determinado a partir de pruebas
experimentales y las capacidades operativas del sistema. Para la conversión de
la señal digital a analógica, se implementó un convertidor DAC basado en una
red resistiva R-2R, conformada por resistencias de 2 kΩ y 1 kΩ, técnica
ampliamente utilizada en sistemas de bajo costo para la generación de señales
analógicas.
2.4. Validación
experimental
Para evaluar el desempeño del prototipo, se
realizaron mediciones experimentales utilizando un osciloscopio digital, con el
objetivo de analizar la precisión en frecuencia, amplitud y distorsión de las
señales generadas bajo diferentes condiciones de operación. Asimismo,
se evaluó el desempeño del sistema de comunicación IoT mediante la medición de
la latencia entre el envío de comandos desde la interfaz web y la actualización
efectiva de la señal en el dispositivo. Las pruebas se realizaron bajo
condiciones controladas de red WiFi (intensidad de señal superior a −60 dBm) y
se repitieron en 30 ocasiones para obtener valores promedio y desviación
estándar.
|
Figura 4 Interfaz y arquitectura del sistema
WaveGen-IoT |
|
|
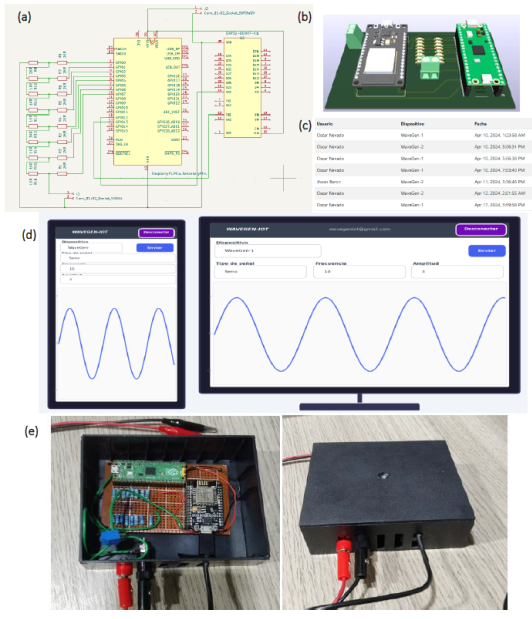
NAMientras que en la Figura 4b se muestra una
representación tridimensional del prototipo desarrollado, incluyendo los
terminales de alimentación y salida de señal. Además de facilitar la operación
del prototipo mediante una aplicación web intuitiva y accesible desde cualquier
dispositivo con conexión a internet, el sistema permite monitorear y gestionar
el uso que los usuarios hacen de los prototipos. Esto contribuye a optimizar
los procesos de mantenimiento y la detección de fallos, al posibilitar la
supervisión de su estado en tiempo real. En la Figura 4c se muestran los datos
registrados durante la operación del sistema, donde se almacena información
asociada al uso de los dispositivos, incluyendo el identificador del usuario y
la marca temporal de acceso.
La Figura 4d evidencia la adaptación de la
interfaz a dispositivos móviles, demostrando la capacidad responsiva de la
aplicación. En la Figura 4e se presenta una fotografía del prototipo
implementado. Para su construcción, se optó por emplear una baquelita universal
en la que se soldaron todos los componentes, utilizando una placa de
dimensiones 9 cm × 7 cm. Adicionalmente, se incorporó un conector entre la
alimentación de las placas Raspberry Pi Pico y la ESP8266, con el propósito de
facilitar la depuración del código desplegado en cada una de ellas. Con el fin
de mejorar la portabilidad y el manejo del prototipo, se diseñó una carcasa
externa de 12 cm × 10 cm. Esta fue acondicionada para integrar dos conectores
tipo banana, a través de los cuales se obtiene la señal de salida, así como el
cable de alimentación necesario para energizar todo el sistema.
En cuanto al desempeño del sistema, se evaluó
la precisión en la generación de señales y el comportamiento de la
comunicación. La señal sinusoidal configurada a 10 kHz con una amplitud de 3 V
presentó una frecuencia medida de 10,012 kHz, lo que corresponde a un error
relativo inferior al 0,12%, mientras que la amplitud pico a pico registrada fue
de 3,02 V, con un error menor al 0,7 %. A frecuencias inferiores a 1 kHz, el
error de amplitud se mantuvo por debajo del 0,5%. No obstante, a frecuencias
cercanas al límite superior del sistema (100 kHz), se observó una distorsión
armónica total (THD) aproximada del 3,8 %, evidenciando limitaciones en la
fidelidad de la señal en condiciones extremas de operación. Por otro lado, en
el sistema de comunicación, la latencia promedio medida entre el envío del
comando desde la interfaz web y la actualización efectiva de la señal fue de
320 ms, con una desviación estándar de ±45 ms, estimada a partir de 30 pruebas
consecutivas bajo condiciones
Los resultados obtenidos evidencian que el
prototipo desarrollado presenta un desempeño adecuado en términos de precisión
y estabilidad dentro del rango de operación definido. La baja desviación en frecuencia
(error relativo <0,12 %) y amplitud (error <0,7 %) confirma que la
implementación del convertidor digital-analógico basado en red R-2R de 8 bits
es suficiente para aplicaciones didácticas y de laboratorio. No obstante, el
incremento de la distorsión armónica total (THD) a frecuencias cercanas al
límite superior (100 kHz), alcanzando aproximadamente un 3,8 %, pone de
manifiesto las limitaciones inherentes a la resolución del DAC y al
comportamiento no ideal de la red resistiva, especialmente en la reconstrucción
de señales sinusoidales a altas frecuencias. Este comportamiento resulta
consistente con lo reportado por Daruwala et al. (2019) en diseños de bajo
costo basados en microcontroladores, donde se evidencian restricciones
similares en la fidelidad de la señal debido a la cuantización y a la limitada
resolución del sistema. Sin embargo, el prototipo propuesto logra extender
significativamente el rango de operación hasta 100 kHz, superando el límite de
10 kHz reportado en dicho estudio, lo que representa una mejora relevante en
términos de capacidad funcional dentro de soluciones de bajo costo.
En cuanto al desempeño del sistema de
comunicación, la latencia observada entre la interacción del usuario y la
respuesta del dispositivo se mantiene dentro de un rango aceptable para
aplicaciones educativas. Aunque no se trata de un sistema de control en tiempo
real estricto, la capacidad de respuesta obtenida permite una interacción
fluida y perceptiblemente inmediata desde la perspectiva del usuario. La reducción
de latencia frente a esquemas tradicionales de comunicación, como HTTP polling,
respalda la elección del protocolo WebSocket como mecanismo eficiente para la
transmisión de datos en sistemas IoT distribuidos. No obstante, la dependencia
de condiciones estables de conectividad WiFi introduce una limitación operativa
que podría afectar el desempeño en entornos con infraestructura de red
deficiente. En la Tabla 2 se presenta una comparación entre el prototipo
desarrollado y otros generadores de funciones reportados en la literatura, así
como con un equipo comercial de referencia, lo que permite contextualizar su
desempeño dentro del estado del arte.
|
Tabla 2 Comparación del prototipo con generadores reportados en la literatura
y equipos comerciales |
||||
|
Característica |
Este trabajo |
Daruwala et al. (2019) |
Xu et al. (2011) – FPGA |
Tektronix AFG3102
(comercial) |
|
Rango de frecuencia |
10 Hz – 100 kHz |
1 Hz – 10 kHz |
Hasta varios MHz |
1 μHz – 100 MHz |
|
Amplitud máxima |
3,3 Vpp |
10 Vpp |
Variable |
±10 Vpp |
|
Control remoto (IoT) |
Sí (WebSocket) |
No |
No |
Parcial (LAN propietaria) |
|
Costo estimado |
~$50.000 COP (~12 USD) |
~15 USD |
N/D (prototipo académico) |
>2.000 USD |
|
Resolución DAC |
8 bits |
8 bits |
Alta (FPGA) |
14 bits |
|
Plataforma de control |
RP2040 + ESP8266 |
Arduino |
FPGA FLEX 10K |
DSP dedicado |
El análisis comparativo evidencia que, si
bien el sistema propuesto presenta limitaciones en resolución y amplitud frente
a equipos comerciales, ofrece ventajas significativas en términos de
accesibilidad económica y capacidad de integración con tecnologías de
conectividad. A diferencia de los trabajos de Daruwala et al. (2019) y Xu et
al. (2011), el presente sistema incorpora de manera nativa un esquema de
control remoto a través de internet basado en WebSocket y soportado sobre
infraestructura en la nube, lo que amplía considerablemente su aplicabilidad en
entornos de laboratorio remoto y educación virtual. Asimismo, la incorporación de
funcionalidades como el registro de uso por usuario y dispositivo introduce un
valor añadido desde la perspectiva pedagógica, permitiendo el seguimiento de
actividades y facilitando procesos de supervisión académica, característica que
no suele estar presente ni en prototipos experimentales ni en equipos
comerciales convencionales.
No obstante, las limitaciones identificadas
deben ser consideradas en función del contexto de aplicación. La resolución de
8 bits del DAC restringe la fidelidad de la señal a frecuencias elevadas, donde
los efectos de cuantización y distorsión se vuelven más notorios. Del mismo
modo, la amplitud máxima de 3,3 Vpp, determinada por el nivel lógico del
microcontrolador RP2040, limita su uso en aplicaciones que requieren señales de
mayor potencia. En
este sentido, futuras mejoras del sistema podrían orientarse a la incorporación
de un convertidor digital-analógico de mayor resolución (12 o 16 bits), así
como al diseño de una etapa de amplificación analógica que permita ampliar el
rango de amplitud de salida. Adicionalmente, la implementación de
funcionalidades avanzadas, como modulación en amplitud (AM), modulación en
frecuencia (FM) o generación de señales arbitrarias, permitiría extender
significativamente las capacidades del prototipo y su utilidad en entornos
académicos más exigentes.
5. Conclusiones
Los resultados
experimentales evidencian que el sistema presenta un desempeño adecuado dentro
del rango de operación de 10 Hz a 100 kHz, con errores de frecuencia inferiores
al 0,12 % y de amplitud menores al 0,7 %, lo que confirma la precisión
aceptable del convertidor digital-analógico basado en red R-2R de 8 bits para
aplicaciones didácticas. No obstante, a frecuencias elevadas se observa un
incremento en la distorsión armónica, atribuible a las limitaciones de
resolución del DAC y a la naturaleza del proceso de conversión
digital-analógica.
El
sistema propuesto destaca frente a trabajos previos por la integración de
conectividad IoT mediante el uso de WebSocket sobre infraestructura en la nube,
lo que permite la comunicación en tiempo real entre la interfaz de usuario y el
dispositivo. Asimismo, su costo de fabricación cercano a los 12 USD lo
posiciona como una alternativa altamente accesible frente a equipos
comerciales, aunque presenta limitaciones en resolución (8 bits) y amplitud
máxima (3,3 Vpp), lo que restringe su uso en aplicaciones que requieren mayor
fidelidad o niveles de señal más elevados.
Todos los autores contribuyeron en la
conceptualización, curación de datos, análisis formal, adquisición de fondos,
investigación, metodología, administración del proyecto, recursos, software,
supervisión, validación, visualización, redacción del borrador original y
revisión y edición del manuscrito.
Conflictos
de interés
Los
autores manifiestan no tener conflictos de interés.
6.
Referencias bibliográficas
Barrio Andrés, M. (2022). Internet
de las cosas (3.ª ed.). Editorial Reus.
Burke, C. T. (1930). The
standard-signal method of measuring receiver characteristics. The General
Radio Experimenter, 4(10), 1–8. https://www.ietlabs.com/pdf/GR_Experimenters/1930/GenRad_Experimenter_March_1930.pdf
Batavale, P., &
Daruwala, R. D. (2019, del
6 al 8 de julio). Remotely configurable low cost arbitrary function generator
[conferencia]. 2019 10th International Conference on Computing,
Communication and Networking Technologies (ICCCNT), Kanpur, India. https://doi.org/10.1109/ICCCNT45670.2019.8944488
Li, W.-G. (2020, del 7 al 8
de noviembre). Laboratory management system based on Internet of Things
[Conferencia]. En Proceedings of the 2020 International Conference on Robots
& Intelligent System (ICRIS), Sanya, China. https://doi.org/10.1109/ICRIS52159.2020.00082
Li, Y., Wang, M., & Wu,
M. (2019, del 18 al 20 de setiembre). Design of electromagnetic signal
generator based on field programmable gate array [conferencia]. En International
Workshop on Electromagnetics: Applications and Student Innovation Competition
(iWEM), Qingdao, China. https://doi.org/10.1109/iWEM.2019.8887897
Molina-Ríos, J., Zea-Ordóñez,
M., Contento-Segarra, M., & García-Zerda, F. (2018). Comparación de metodologías
en aplicaciones web. 3C Tecnología, 7(1), 1–19. http://dx.doi.org/10.17993/3ctecno.2018.v7n1e25.1-19
National Instruments. (5 de
junio de 2025). Generar una señal: Tipos de generadores de funciones,
consideraciones de DAC y otra terminología común. https://www.ni.com/es/shop/electronic-test-instrumentation/waveform-generators/generating-signals-function-generators.html
Oppenheim, A. V., &
Schafer, R. W. (2016). Discrete-time signal processing (3rd ed.).
Pearson Education. https://api.pageplace.de/preview/DT0400.9781292038155_A24581738/preview-9781292038155_A24581738.pdf
Ott, H. W. (2009). Electromagnetic
compatibility engineering. John Wiley & Sons. https://daskalakispiros.com/files/Ebooks/Electromagnetic%20Compatibility%20Engineering.pdf
Prasad, S. S., &
Sanyal, S. K. (2007, del 13 al 14 de julio). Design of arbitrary waveform
generator based on direct digital synthesis technique using Code Composer
Studio platform [conferencia]. En International Symposium on Signals,
Circuits and Systems, Iasi, Romania https://doi.org/10.1109/ISSCS.2007.4292709
Raspberry Pi Ltd. (2024). RP2040
datasheet: A microcontroller by Raspberry Pi (pp. 92–100). Raspberry Pi. https://pip-assets.raspberrypi.com/categories/814-rp2040/documents/RP-008371-DS-1-rp2040-datasheet.pdf?disposition=inline
Tan, B.-L., Lee, W.-K.,
Mok, K.-M., & Goh, H.-G. (2018, del 8 al 9 de noviembre). Clock gating
implementation on commercial field programmable gate array (FPGA) [conferencia].
En 4th International Conference on Electrical, Electronics and System
Engineering (ICEESE), Kuala Lumpur, Malaysia. https://doi.org/10.1109/ICEESE.2018.8703530
Vince, T. (2020). IoT
implementation in remote measuring laboratory VMLab analyses. Journal of
Universal Computer Science, 26(11), 1402–1421. https://doi.org/10.3897/jucs.2020.074
Wheeler, H. A. (1930).
Constant-amplitude oscillator for measuring transmission-line properties. The
General Radio Experimenter, 5(2), 1–4.
Xu, M., Hu, J., & Gao,
Y. (2011, del 30 al 31 de julio). FPGA-based design and implementation of
arbitrary waveform generator [conferencia]. 2011 International Conference on
Control, Automation and Systems Engineering (CASE), Singapur. https://doi.org/10.1109/ICCASE.2011.5997708